Prototyping Performative Models for Design
|
This is a summary of a lecture given by Mirco Becker at the kick-off event for DRX 2013 at HENN, Berlin Models are an integral part of the design process if we don’t regards them as miniature representation of the design but as abstract systems. Such a system captures dependencies, gives a compact description and allows to evaluate performance before realization. 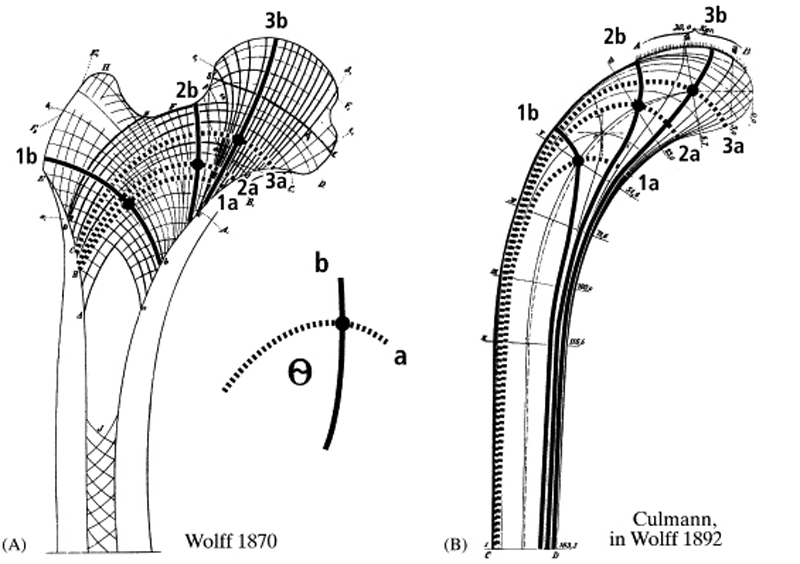 Graphic Static Method as found by Wolf / Culmann Historically, build structures evolved slowly over time by trail and error and as evaluation methods were lacking to make any analytical forecast on the behavior of the design. For centuries advances were mainly in the crafts. Only in the 19th century new analysis methods allowed to fully liberate the design process. A journey that started in Renaissance with Filippo Brunelleschi and found its break-through with Karl Culmann’s Graphic Static method. First Generation Performative ModelsIn the 1960s Frei Otto and Heinz Isler build elaborate models which measured the forces in grid-shells and cable-net structures experimentally continuing the work initiated by Antonio Gaudi. These models included spring gauges, tension scales and pressure sensors. Measurements from these sensors where extrapolated to dimension elements for construction. At this point neither the computation power nor the algorithms where available to do this digitally.  Performative model by Frei Otto Computational ModelsSince physical simulation is available in popular design software (Daniel Piker, Kangaroo Plug-In, 2008) the work done in the 60s can now run in realtime on laptops machines. Any computation requires a discretization of form. In a mass-spring simulation a discretization for cloth is very different than the one for a metal sheet. Nowadays designer are literate in formulation a problem to match computational methods as well as developing their own algorithms. See also gPlanks. Second Generation Performative ModelsRecent developments in 3d-printing materials allow for robust and an cost efficient prototyping. This gives the opportunity to physically prototype the discretized models used for computation and embedding specific joint conditions, elasticity, roughness into them without the need for manual assembly. These models might help expend the repertoire of rigorous physical models and in that sense provide a novel way of continuing the work on performative models of the first generation.  Friction joint system with scissor mechanism, 3d-print |
Pingback: Agenda 2014 – Deep Research | Architecture & Performative Design